
Automatización
Minimizing EMI in Automation Facilities
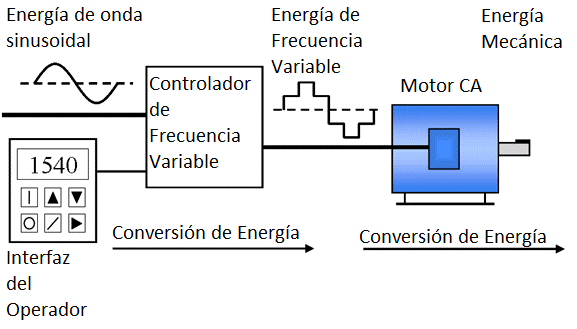
La capacidad de controlar tanto el par como la velocidad de los motores fue una evolución de los sistemas de control electrónico de potencia, que se ha etiquetado como Accionamiento Industrial. Sin embargo, este término no es del todo correcto ya que se refiere a un sistema que contiene tanto el motor como todos los controles electrónicos asociados. El término usado para dichos controles es Variador de Frecuencia (VF).
El VF consta de tres partes: el rectificador, el estabilizador de corriente continua (CC) y el inversor. El rectificador toma la corriente alterna (CA) entrante y la transforma en corriente continua (CC). El estabilizador dispone de varios condensadores para almacenar la energía a la salida del rectificador. El inversor crea una señal de 2-20kHz que se utiliza para crear la forma de onda de salida utilizando la modulación de ancho de pulso (PWM).
Al modificar la forma de onda de salida, el VF puede ajustar tanto el par como la velocidad del rotor. Esta técnica de PWM utiliza un puente trifásico hecho de transistores bipolares de puerta aislada ó IGBT que al conmutar a una alta velocidad transforma la energía rectificada y estabilizada, en tensión alterna (CA) de alta frecuencia. Al variar el tiempo en que los IGBT están encendidos o apagados, el VF dibuja a la salida una forma de onda casi perfecta. Por lo tanto, el VF puede reproducir fielmente todas las frecuencias necesarias para satisfacer las necesidades del motor.
Un motor brushless (sin escobillas) gracias a la electrónica puede ser controlado por un VF desde cero a 6.000 rpm variando su frecuencia de salida. La frecuencia de salida del VF determina la velocidad de rotación del motor. Esto tiene dos ventajas diferenciadas: Primero, la velocidad del motor se puede controlar directamente con el VF y, segundo se puede controlar el par. Con esto podemos mantener el control del motor. Por ejemplo, si un motor reduce repentinamente su carga, el VF puede reaccionar reduciendo el par al motor para evitar un exceso de velocidad del motor.
El concepto de control del motor se puede llevar más lejos agregando un encoder para medir la posición del eje del motor. Ahora, el controlador dispone de una referencia para controlar la posición del eje. A este tipo de control se le denomina “Servomotor”, generalmente este tipo de aplicación cuelga de un control externo, en aplicaciones simples, se puede delegar este control a la propia unidad.

La mayoría de los VF utilizan IGBT con transistores de potencia. Las velocidades de conmutación de los IGBT pueden superar los 700Voltios/milisegundo. Estas velocidades pueden reducir la pérdida de potencia durante la conmutación, pero crean interferencias electromagnéticas (EMI) en el resto de la máquina. Las altas frecuencias, junto con la gran conmutación de tensión, crea dos efectos potencialmente adversos: Primero, los cables entre el VF y el motor se convierten en antenas generadoras de ruido radiado. Los efectos radiados pueden alcanzar 200 Voltios/metro. Si se colocan otros conductores cerca de los cables del motor, ambos se acoplarán trasladando el ruido al sistema. En segundo lugar el ruido se propagará por conducción a través de la entrada de alimentación al variador. Este no tiene la misma energía que los cables de salida al motor, pero es lo suficientemente alto como para afectar a otros componentes del sistema. Esta situación requiere el uso de los filtros EMI/RFI de Enerdoor.
Motor Asíncrono y Motor Síncrono
Un motor asíncrono es cualquier motor directamente alimentado por una red de energía de tres fases
La parte interior, llamada rotor, rota a una frecuencia menor que la de la energía que lo alimenta, 50/60Hz. La zona exterior fija se llama estator. Un motor asíncrono girará un poco más lento que la frecuencia de la energía con la que se alimenta. Esta diferencia de velocidades se llama voluta.
El motor síncrono es un motor también alimentado por una red de energía de tres fases. Según el motor gira a la misma velocidad que el poder de alimentación, este motor debe ser previamente hilado a la frecuencia adecuada antes de ser acoplado a la fuente energía.
En cualquier caso, la velocidad del motor no puede ser ajustada una vez que está girando. El motor asíncrono girará justo por debajo de la frecuencia de energía y el síncrono lo hará a la misma frecuencia.
Enerdoor tiene varios filtros para mitigar las interferencias electromagnéticas asociadas con los variadores de frecuencia. Cada serie tiene múltiples filtros con distintas capacidades de manejo de corrientes. Estas series son FIN538S1, FIN1200, FIN1500. Además, Enerdoor tiene dos series de filtros paralelos para aplicaciones de tres fases; FIN 230SP and FIN730. Todos los filtros en estas series fueron diseñados para mitigar los problemas de EMI/RFI en maquinaria automática.
Un motor asíncrono es cualquier motor alimentado directamente por una red de alimentación trifásica. La parte interior, llamada rotor, gira a una frecuencia inferior a la de la fuente suministrada, 50/60Hz. La envolvente exterior fija se llama estator. Un motor asíncrono girará a una frecuencia ligeramente menor que la frecuencia de la fuente de alimentación. La diferencia de frecuencia entre la energía suministrada y la velocidad de rotación del rotor se denomina desplazamiento.
El motor síncrono es un motor que también es alimentado por una red de alimentación trifásica. La velocidad de rotación del eje y la frecuencia de la red están completamente sincronizadas, el motor gira previamente hasta acoplar sus ejes y girar a la frecuencia de red. En cualquier caso, la velocidad del motor no se puede ajustar una vez que gira. El motor asíncrono girará justo por debajo de la frecuencia de la fuente y el motor síncrono girará exactamente a la frecuencia de la fuente.
Enerdoor tiene varios filtros para mitigar las emisiones EMI asociada a los variadores de frecuencia (VF). Cada serie tiene diferentes filtros con diferentes capacidades e intensidades para coincidir con la solución deseada. Estas series son: FIN538S1, FIN1200, FIN1500, FIN1900 y FIN1900S. Además, Enerdoor tiene dos series de filtros paralelos para aplicaciones trifásicas; FIN230SP y FIN730. Todos los filtros de esta serie fueron diseñados principalmente para mitigar los problemas de emisiones EMI/RFI en las máquinas de automatización.